2025人形机器人行业专题:执行系统之旋转关节:扭矩跃升,动力内核
今天分享的是:2025人形机器人行业专题:执行系统之旋转关节:扭矩跃升,动力内核
报告共计:32页
人形机器人执行系统之旋转关节研究总结
人形机器人产业发展迅速,执行系统的旋转关节作为关键部分,在技术和产业层面都备受关注。
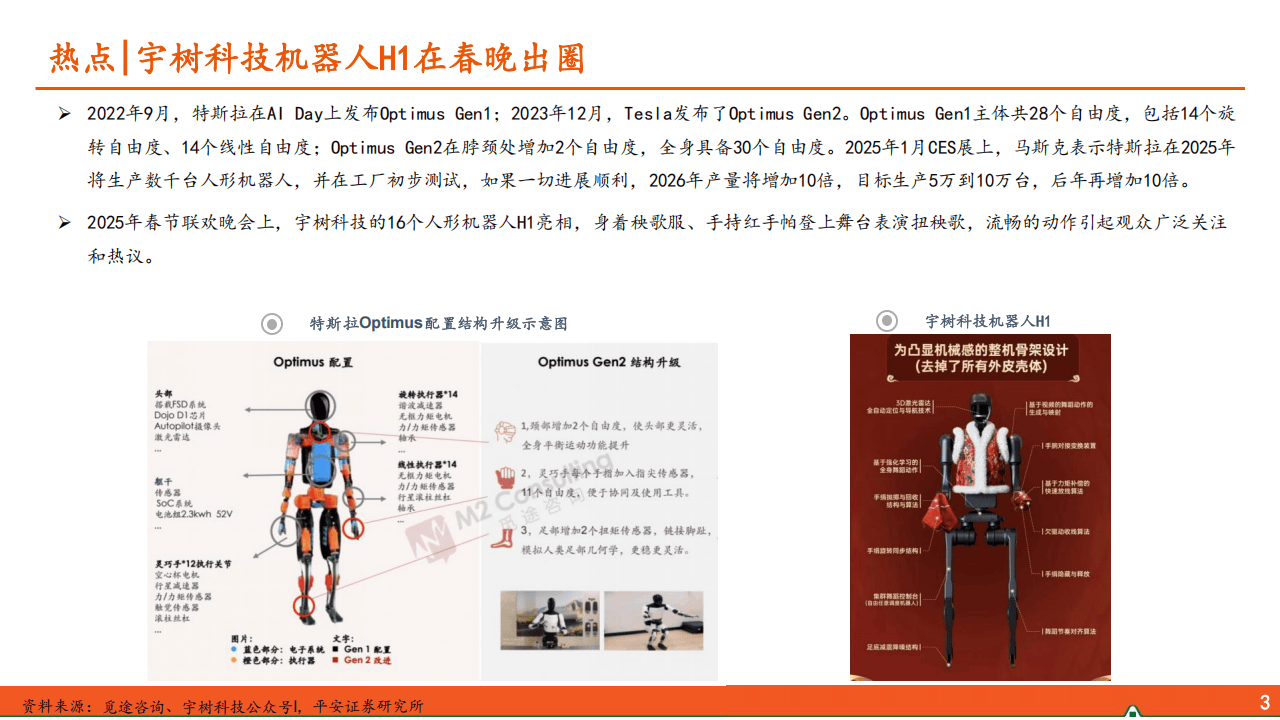
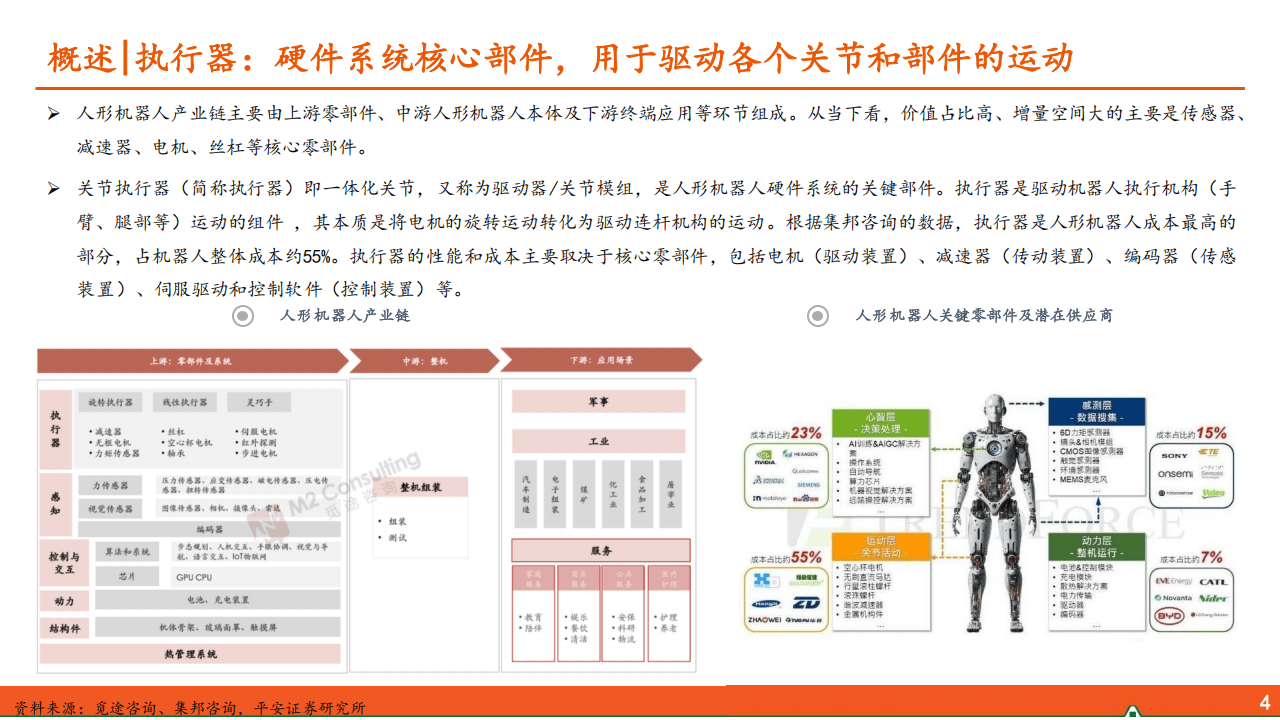
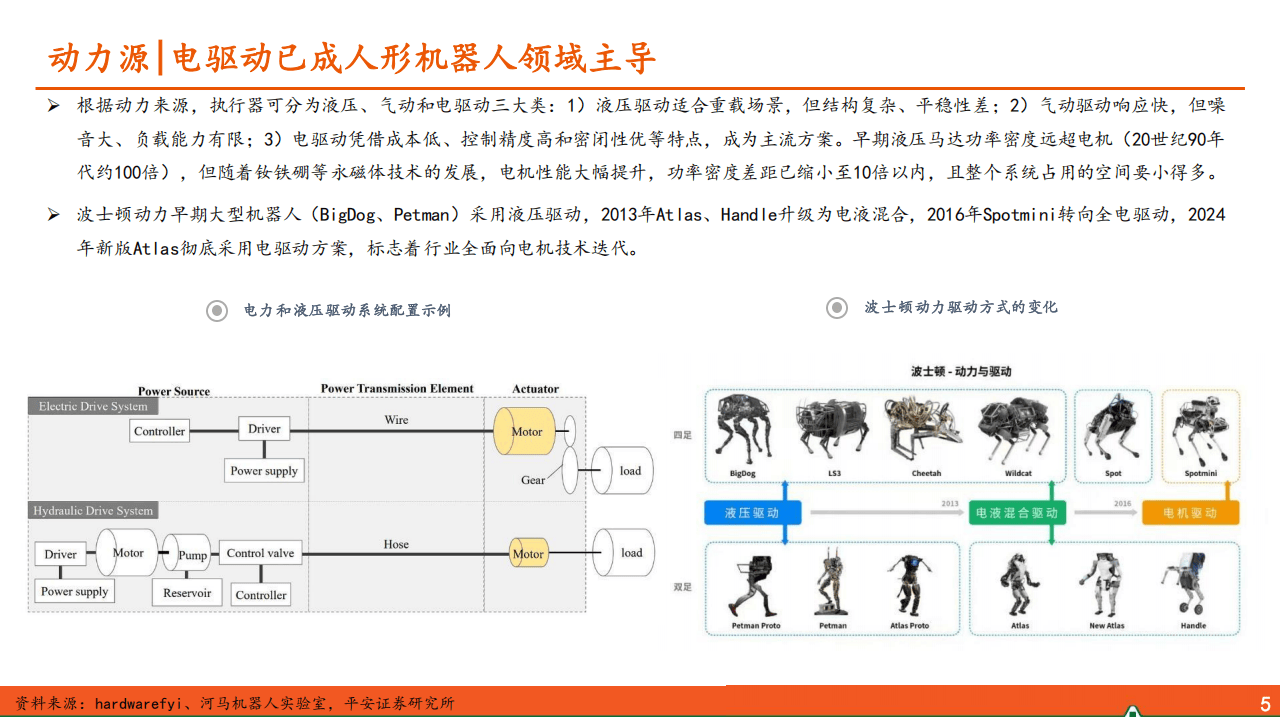
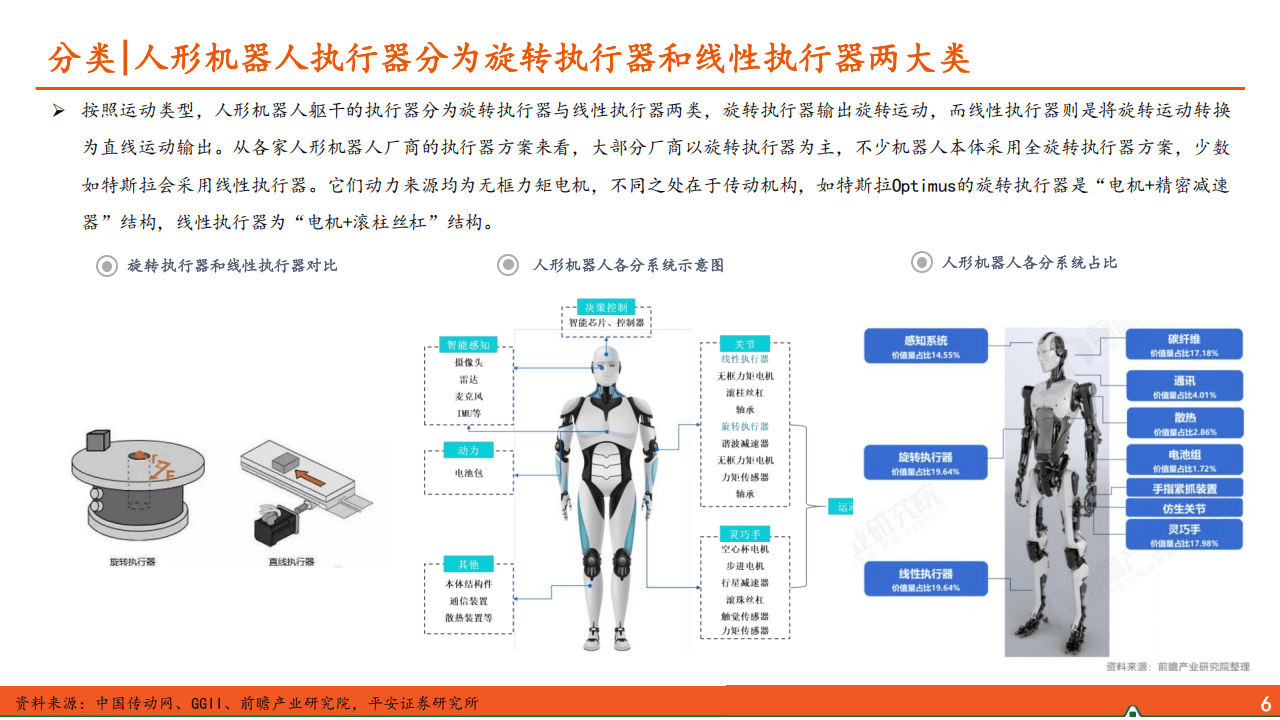
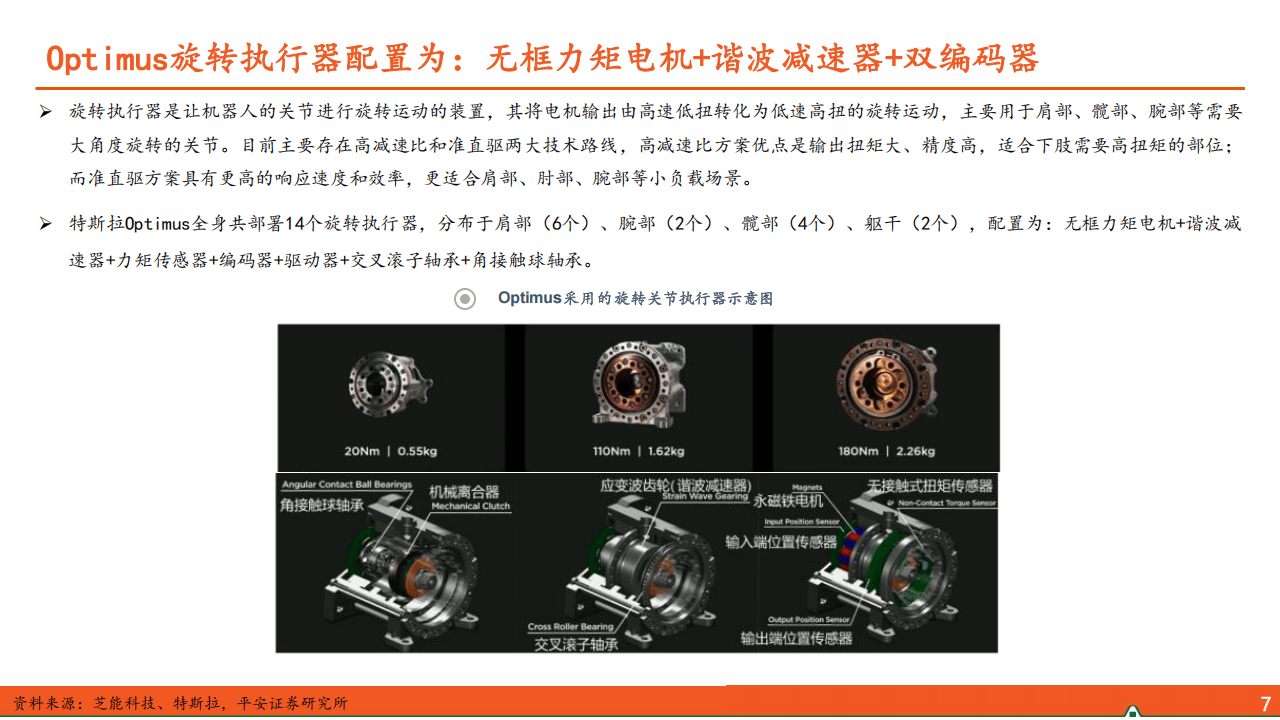
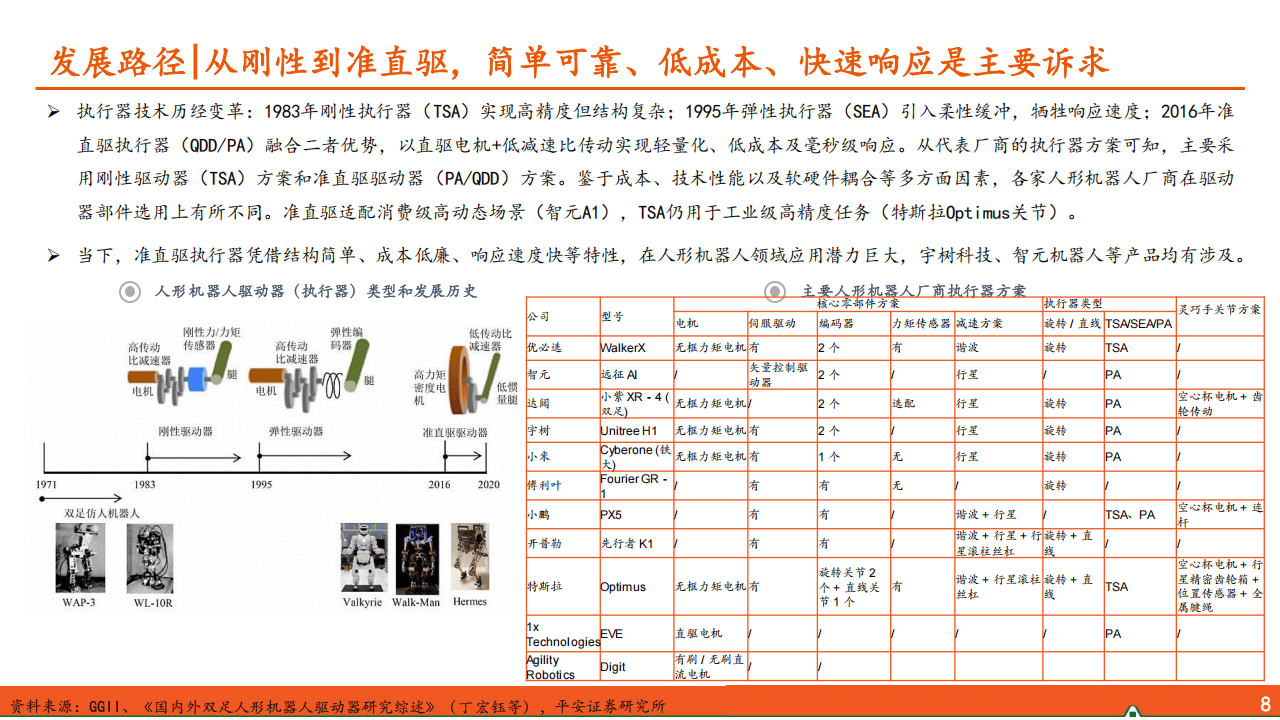
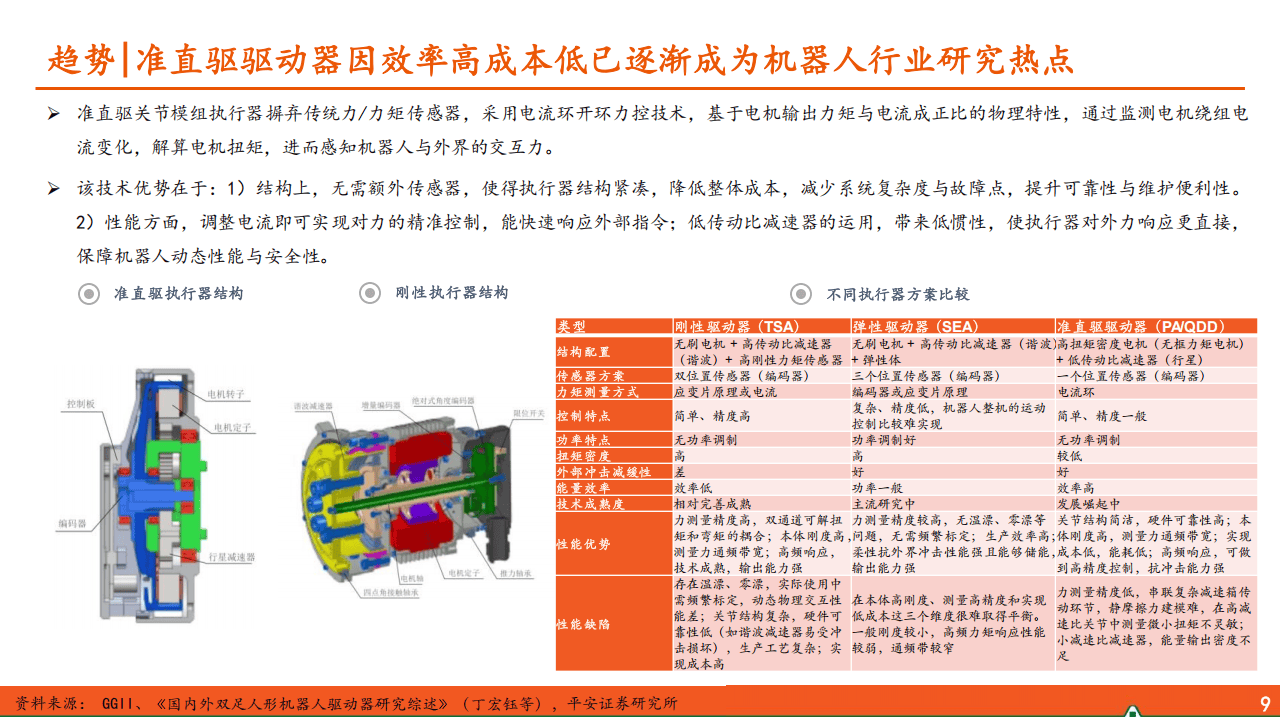
执行器作为人形机器人硬件系统核心,占整机成本约55%,其性能和成本取决于电机、减速器等核心零部件。依据动力来源,执行器分为液压、气动和电驱动三类,电驱动因成本低、控制精度高、密闭性优成为主流。从运动类型看,人形机器人躯干执行器分为旋转和线性执行器,多数厂商以旋转执行器为主,如特斯拉Optimus的旋转执行器采用“电机 + 精密减速器”结构 。
电机是机器人的动力源,人形机器人对电机要求为高效率、高动态、高功率密度。无框力矩电机凭借高转矩密度、紧凑结构和散热优势,在人形机器人关节单元广泛应用,像特斯拉Optimus及众多国产机器人都有使用。不过,国内无框力矩电机企业与国际领先企业存在技术差距,美国科尔摩根等海外厂商占据市场主导地位。
减速器在机器人中用于降低转速、增加扭矩,对机器人精度和负载有重要影响。精密减速器主要包括谐波、RV、行星减速器等。鉴于人形机器人对小型化和轻量化的高要求,谐波和精密行星减速器最为适配。在谐波减速器领域,国产品牌取得突破,绿的谐波市场份额居国内前列;精密行星减速器市场外资厂商居多,湖北科峰在国内排名靠前;RV减速器在重负载领域占主导,用于工业机器人,国内企业环动科技市占率不断提升。
一体化关节模组是机器人关节技术的发展方向,它集成多种核心部件,能提升性能、优化成本、拓展应用场景。同时,国家政策支持机器人产业发展,推动供应链和关键零部件自主开发,加速人形机器人产业化进程。
随着技术的持续进步,人形机器人执行系统的旋转关节在性能和成本方面有望进一步优化,推动人形机器人在更多领域实现广泛应用,促进产业的快速发展。
以下为报告节选内容

报告共计: 32页
中小未来圈,你需要的资料,我这里都有!


