2025机器人灵巧手行业深度报告:东风已至,星辰大海
今天分享的是:2025机器人灵巧手行业深度报告:东风已至,星辰大海
报告共计:39页
《灵巧手行业深度报告:东风已至,星辰大海》围绕人形机器人灵巧手展开全面剖析,深入探讨其在行业中的关键地位、技术构成、产业链现状等内容。
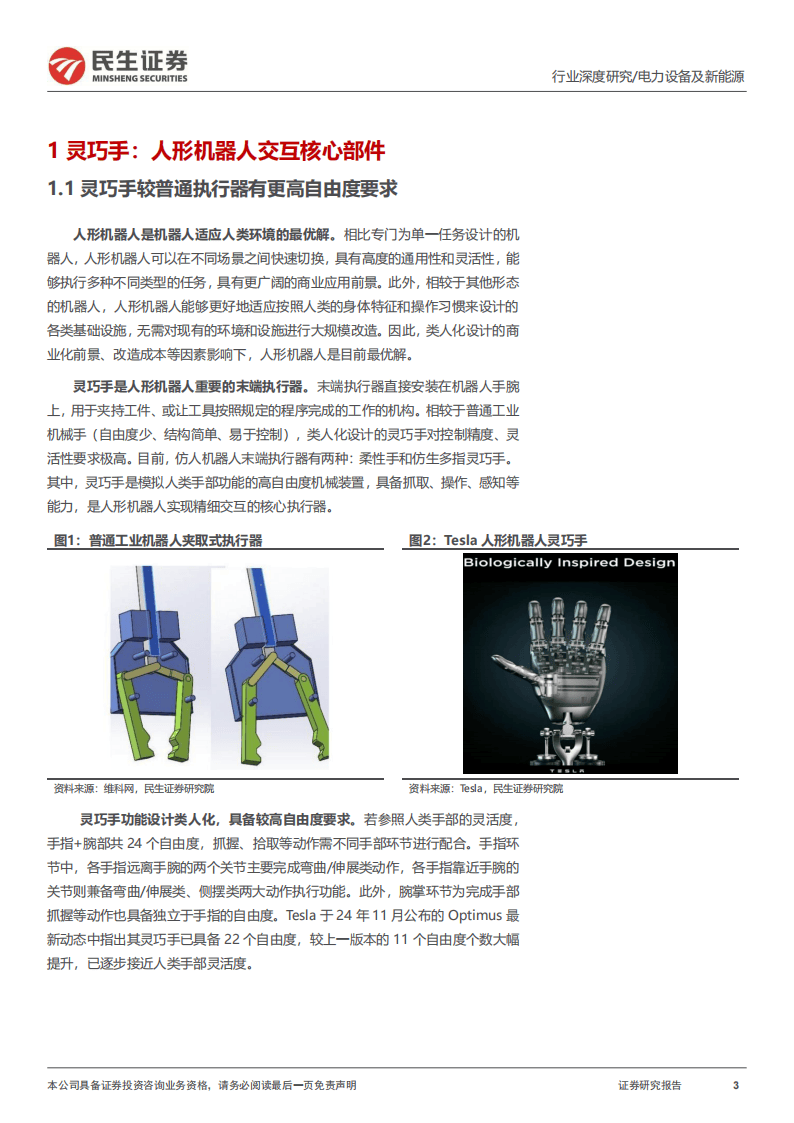
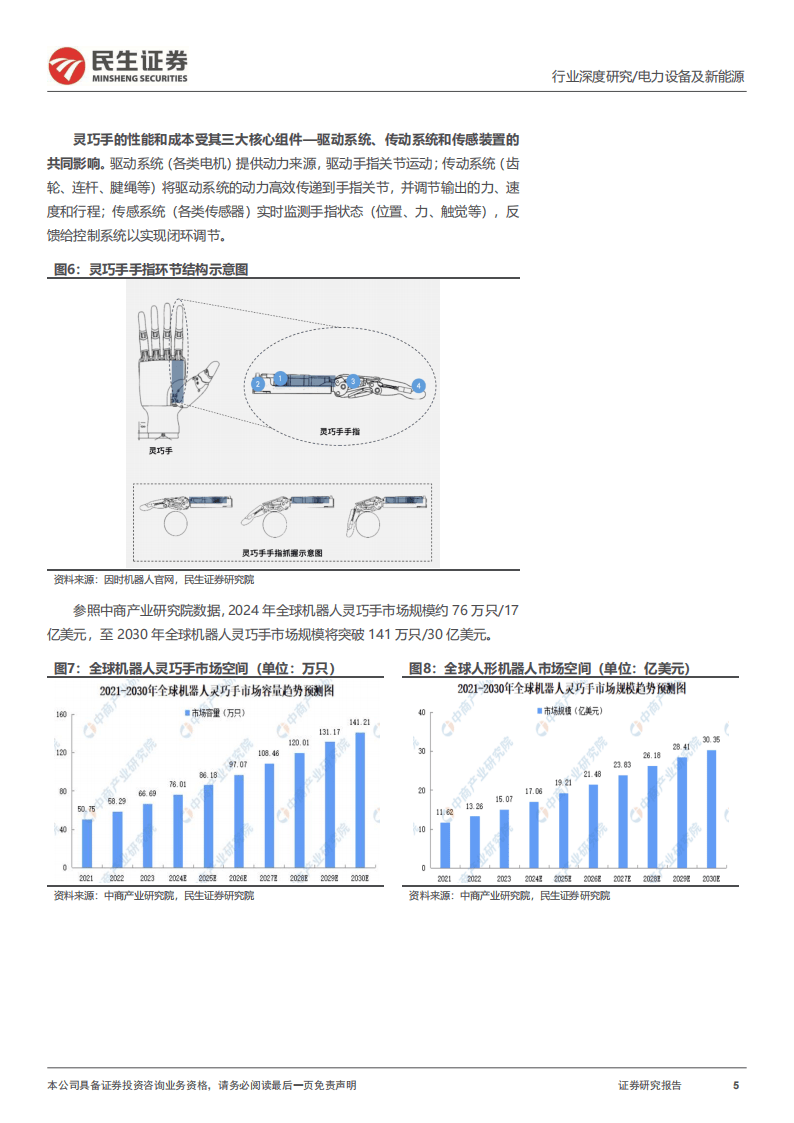
1. 灵巧手:人形机器人的核心交互部件:人形机器人因能适应人类环境、通用性强,成为机器人发展的重要方向。灵巧手作为其关键末端执行器,模拟人类手部功能,自由度高,需具备负载、运动、控制、感知等多种能力,以实现精细交互,如抓取、操作物体等。据中商产业研究院数据,2024 - 2030年全球机器人灵巧手市场规模将持续增长,前景广阔。
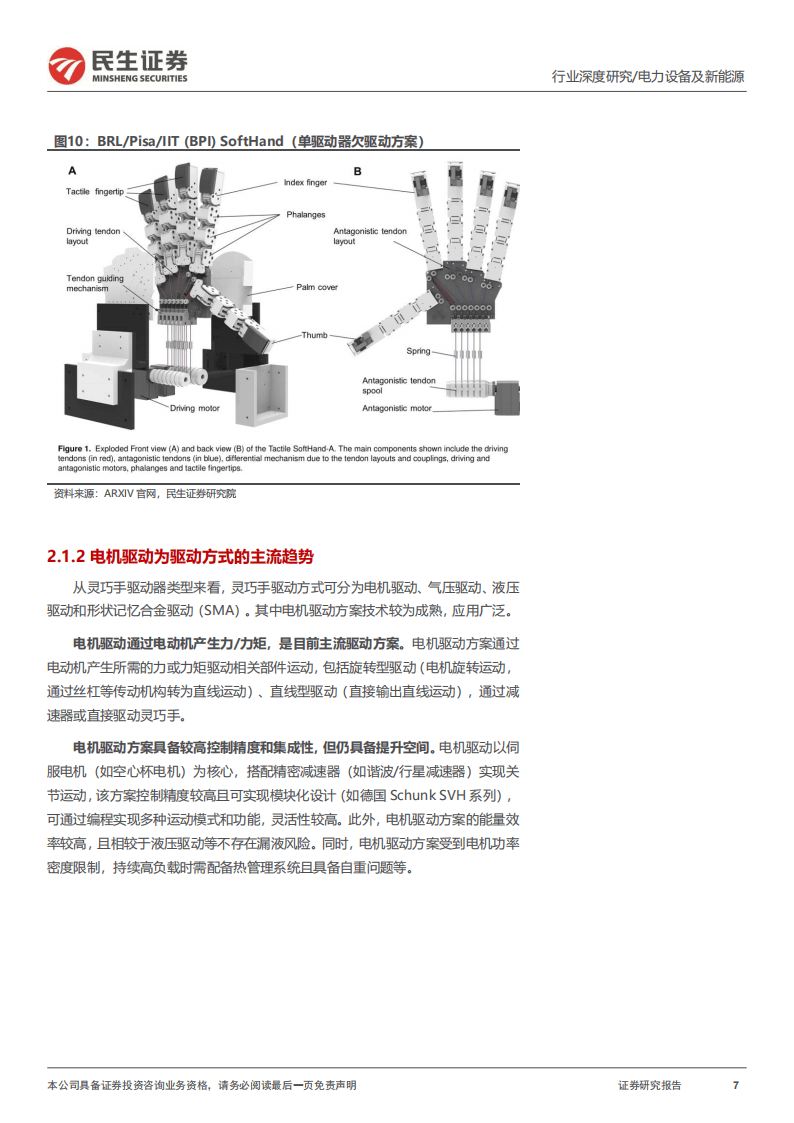
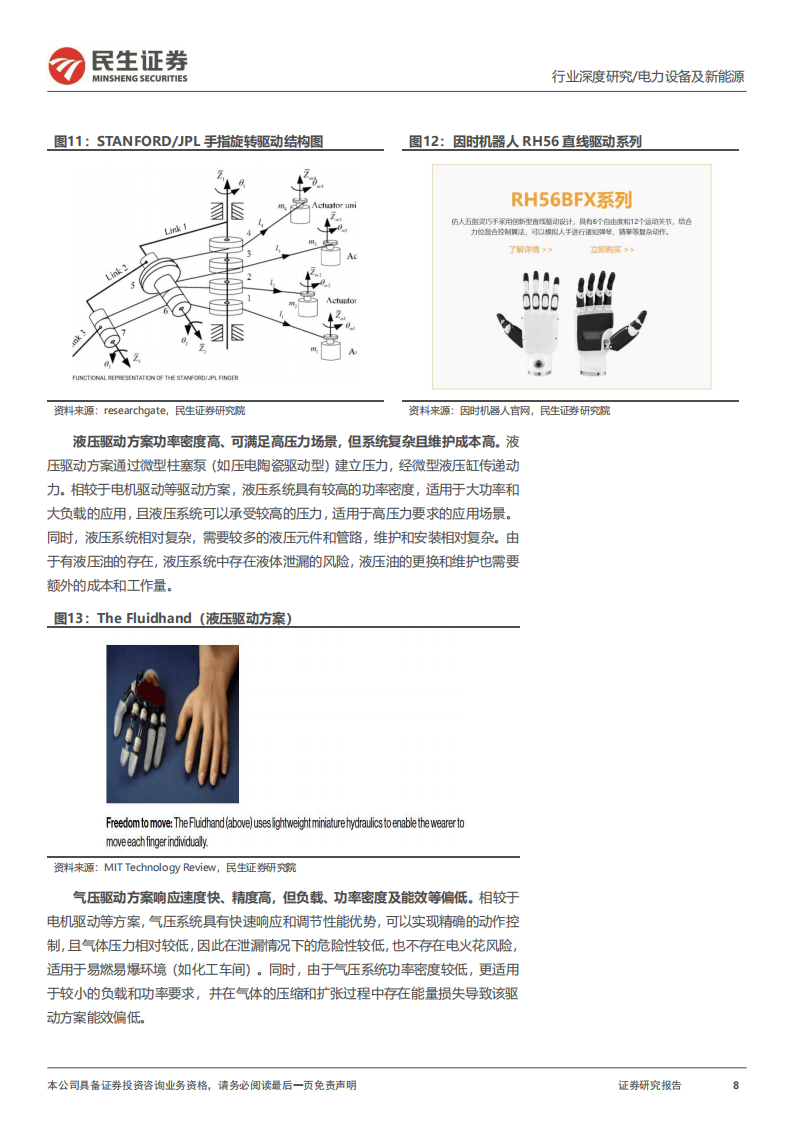
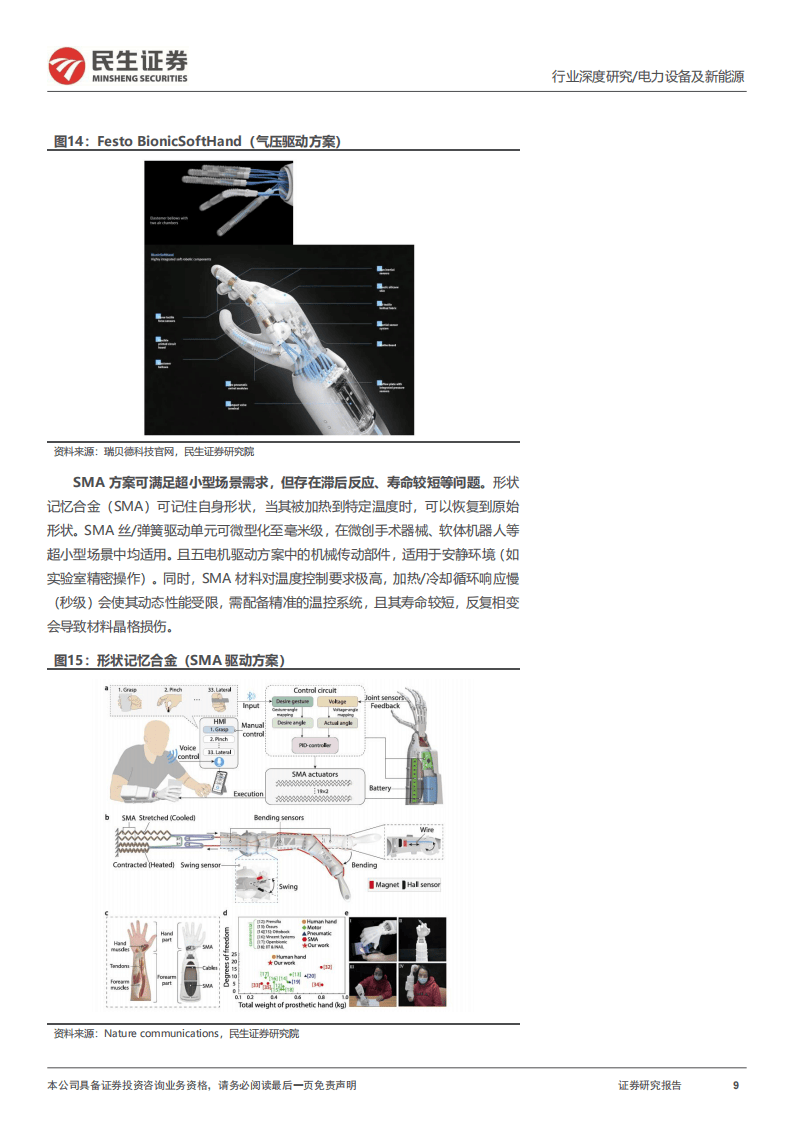
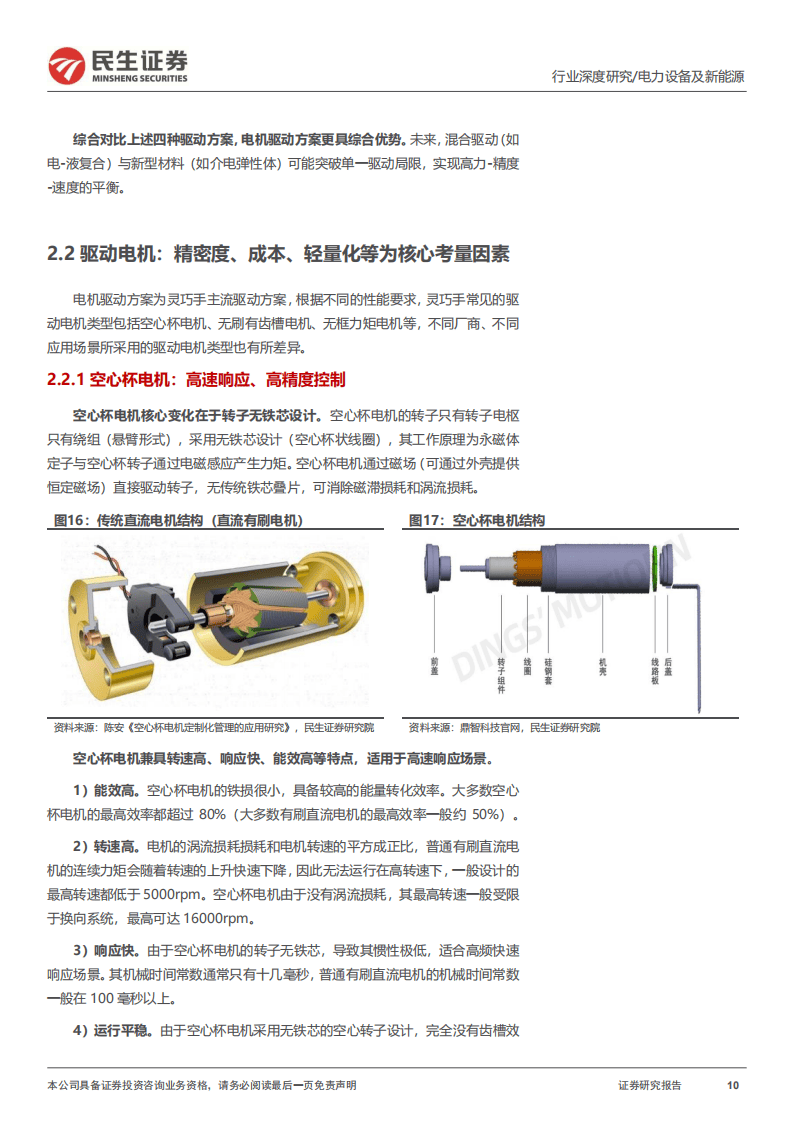
2. 驱动系统:为灵巧手提供动力核心:驱动系统决定灵巧手的动作灵活性。从驱动形式看,欠驱动虽牺牲部分精度,但在体积、成本上更具优势,应用广泛;电机驱动凭借较高控制精度和集成性成为主流。常见驱动电机中,空心杯电机转速高、响应快、能效高,适用于轻负载场景;无刷有齿槽电机扭矩大、成本低,在高扭矩需求场景优势明显。
3. 传动系统:多样方案协同运作:传动系统负责传递动力和运动,向高精度、轻量化、仿生化和智能化发展。丝杠传动中,滚珠丝杠精度高,内循环式更适合灵巧手;齿轮减速装置里,谐波减速器精度高、体积小,行星减速器扭矩大、成本低,蜗轮蜗杆传动则有自锁特性。腱绳传动轻量化优势突出,而连杆传动定位精度高、刚度大,各有优劣,多方案结合的形式正逐渐兴起。
4. 传感系统:赋予灵巧手感知能力:传感器是灵巧手实现精确操作的关键,包括力/力矩、触觉、位置/角度等多种类型,正朝着多区域、柔性化、多模态发展。例如,六维力传感器能为机器人提供类似人类触觉的功能;柔性/电子皮肤传感器可模仿人类皮肤感知,虽处于早期阶段,但潜力巨大。
5. 产业链现状:以Optimus为例:特斯拉Optimus从Gen1到Gen3,灵巧手自由度不断提升,如Gen3灵巧手已具备22个自由度,且在传动、操作能力等方面持续优化。随着人形机器人行业快速发展,灵巧手作为核心部件,将在多代际更迭中受益,有望迎来更广阔的发展空间。
以下为报告节选内容


报告共计: 39页
中小未来圈,你需要的资料,我这里都有!


