“黑匣子”、大长腿、领跑员……解码天工机器人马拉松夺冠秘籍
贝壳财经原创出品
记者陈维城
编辑 金彧
实习生 彭紫桐
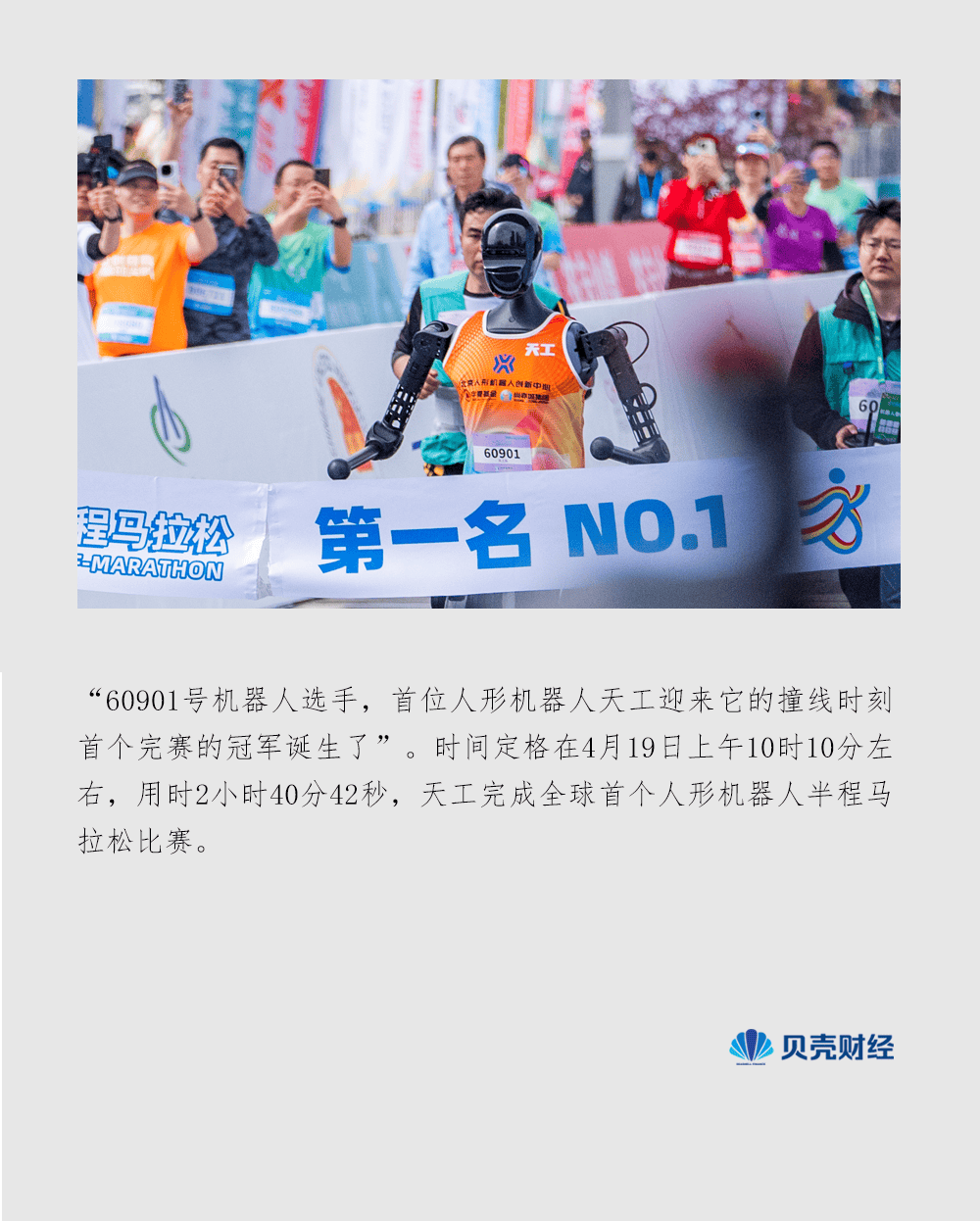
“60901号机器人选手,首位人形机器人天工迎来它的撞线时刻,首个完赛的冠军诞生了”。时间定格在4月19日上午10时10分左右,用时2小时40分42秒,天工完成全球首个人形机器人半程马拉松比赛。
在一位领跑员和一位护跑员的带领下,天工以自己的方式成功夺冠,并创造了历史。此时位于北京亦庄通明湖信息城的终点,已经完成冲线的人类选手和隔离带外的媒体、居民等在此聚集翘首以盼“冠军”的出现,现场爆发出欢呼声和一阵热烈的掌声。
这位参赛选手天工Ultra身高180cm,体重55kg,是由北京人形机器人创新中心研发。
“天工夺冠充分验证了它的可靠性与稳定性。其实还有更惊艳的东西,有待挖掘”。北京人形机器人创新中心总经理熊友军对新京报贝壳财经记者说。
北京人形机器人创新中心首席技术官唐剑在接受新京报贝壳财经记者采访谈及天工夺冠时表示,“天工整体表现还是非常不错的,主要是指它的整体速度以及完成时间。大家看到天工中途有一次摔跤,那是因为电池没电了,换电后很快便恢复了奔跑状态。本次全程只用了同一台机器人便完成了整个半程马拉松比赛。”
实际上,这并不是 “天工”首次亮相北京亦庄半程马拉松,它曾于2024年11月亮相北京亦庄半程马拉松,担任“加油官”,引起广泛关注。
️01
️️跟随导航+长程路径规划
️“黑匣子”为天工指引方向️️️️
展开全文️01
️️跟随导航+长程路径规划
️“黑匣子”为天工指引方向️️️️
️01
️️跟随导航+长程路径规划
️“黑匣子”为天工指引方向️️️️
这不仅是一场人机共跑的马拉松,更是人机协同参赛的系统工程。
参赛的20支队伍共有18款机器人,它们采取的技术路线并不尽相同,有的需要人类陪跑员,有的可以自主奔跑但需要工程师贴身跟随,多数机器人需要工程师紧跟其侧随时操控键盘。
身高1.8米的天工是20支参赛机器人中最高大的一个,体重55公斤,腿长超过80厘米,采取全新的轻量化设计,最高配速可达12公里/小时。在21公里的马拉松中途摔过一跤,更换了3次电池,最终以2小时40分42秒完成比赛成功夺冠。
当天,工程师出身的熊友军率领团队在终点线外迎接天工,见证了它的夺冠时刻,并满面笑容地为天工鼓掌。
然而,在谈及天工夺冠时,熊友军微笑着表示,天工夺冠充分验证了它的可靠性与稳定性。其实还有更惊艳的东西,有待挖掘。
“天工在备赛过中做了大量训练和测试,还要去做极限测试,并针对各种复杂地形进行测试,以及还有跟随算法的测试。”唐剑介绍道。
记者在现场看到,不同于键盘操控的方式,天工前方2-3米的位置有一名领跑员,该领跑员背后绑有一个板砖大小的黑色盒子(无线发射器),同时,还有一名护跑员在天工身旁不足1米之处,防止天工摔倒,或在它摔倒时随时将天工扶起。这两位陪跑者均是业余马拉松选手,他们是在3月初接到这个特殊的任务,和天工Ultra磨合奔跑了一个多月,最终一起迎来夺冠时刻。
这个神秘的“黑匣子”正是人机共跑的秘密所在。
“我们的方式比较独特,采取的是无线跟随技术”。唐剑向新京报贝壳财经记者介绍,天工机器人前面的那位领跑者,他身上有一个叫UWB标签,我们在机器人上有一个无线的发射器,它发射无线信号并且回收,然后利用我们的算法跟前面的领跑者保持相对比较固定的距离和角度,通过这种半自主的无线跟随技术,可不用遥控器。后面的护跑者也是一位运动员,主要起到保护的作用。
贾宁正是天工这次参赛的领跑员,“负重”带着“黑匣子”全程陪着天工奔跑。出生于1987年的他,是一位业余马拉松选手,曾多次参加全马和半马。不过,这是他第一次和机器人一起奔跑。
“我后腰处背着的板砖大小的黑盒子是传感器,我就是通过它与天工联系,能让它跟着我跑”。贾宁在接受新京报贝壳财经记者采访时表示,他并非天工团队的工作人员,是今年3月刚接到这个特殊的奔跑任务,已经和天工磨合了一个多月。平均每周训练1-2次,日常配速约7分30秒/公里。
谈及本次天工夺冠,贾宁难掩激动地说:“我很骄傲,圆满完成了任务。毕竟这是全球首个人形机器人半程马拉松“。他表示,比赛当天比平常发挥得还要好一些,中间除了因为电池没电跌倒一次之外,并没有更换机器人,比测试赛时要顺利。
️02
️️21公里大约25万次精密关节运动️️
️软硬兼施解决各类难题️
️02
️️21公里大约25万次精密关节运动️️
️软硬兼施解决各类难题️
️02
️️21公里大约25万次精密关节运动️️
️软硬兼施解决各类难题️
除了“黑匣子”帮助领跑员与天工“跟随导航”之外,天工的关节、大腿等身体与”大小脑“均被持续改进。
人形机器人半程马拉松以南海子公园一期南门为起点,通明湖信息城为终点,全长21.0975公里,途经泡桐大道、文博大桥、通明湖公园等北京经开区标志性点位。
21.0975公里的跑道对机器人们来说是一个不小的挑战,对于采用双足步态的人形机器人而言,多位业内人士介绍,跑21公里意味着要完成约25万次精密关节运动。
比赛地形涵盖了平坦柏油路、坑洼裂缝路、长缓坡、短陡坡路段以及石板路、草地、石子路等多种复杂路况。全程线路共包括6个左转道、8个右转道,转弯角度≥90度,考验机器人奔跑时转弯的平衡能力,终点前还设置了一段1.5公里的直道,考验机器人的冲刺速度。
唐剑称,这次比赛主要是对机器人的硬件以及软件的运动算法,或者说机器人的“小脑” 稳定性、可靠性的一次极限的测试。天工机器人的“小脑”也是北京人形机器人创新中心“慧思开物”平台的一部分,测试是一个非常长期的过程。
在他看来,天工的夺冠恰恰因为“软硬兼施”。在硬件方面,首先为天工的“本体”做了轻量化和低惯量的设计,尽量给它减重,同时把踝关节以及膝关节尽量往上提升,让腿部的惯量比较低,腿部跑起来比较轻盈;其次,对一些关节模组的导热设计做了优化,让它能很快达到热平衡,而不是让关节的温度持续上升,因为上升到一定温度,这个关节会失效,这样机器人会摔倒;第三,在脚底做了一些缓冲的设计,尽可能减少对关节膜、对脚底板以及关节模组的磨损。更重要的是,天工的腿比其他赛队的机器人要长,跑得比较快。
在软件方面,唐剑透露,运控算法做了很多优化。一是要在步频、步幅、步态上做非常平衡的最优选择。二是整个奔跑的算法用了现在最先进的强化模拟学习。强化模仿学习的意思就是说要模仿人类,试采人类运动员跑步的数据,让它尽可能接近这些运动员。因为人进化了千年,跑步跑得快一定是有它的道理。但在另一方面,我们把采集的人的数据导入到强化学习的架构。
明年是否还会参加机器人马拉松?是否还需要领跑员与陪护员?据唐剑透露,“我们很快会具备自主导航能力,现在其实已经在研发了,很快就会给大家展示出全自主的导航。这样天工将不再需要人类引导它参加马拉松,明年的机器人马拉松有望看到无人引导的天工在奔跑。”


